BSpline 三次B样条曲线
BSpline 三次B样条曲线
BSpline 三次B样条曲线
Yummy Robot Development Notes 机械臂模型(MDH) MathJax.Hub.Config({ tex2jax: { skipTag...
卡尔曼滤波总结与思考
现代控制理论与经典控制的交汇点

当今时代对AI的思考与反思。
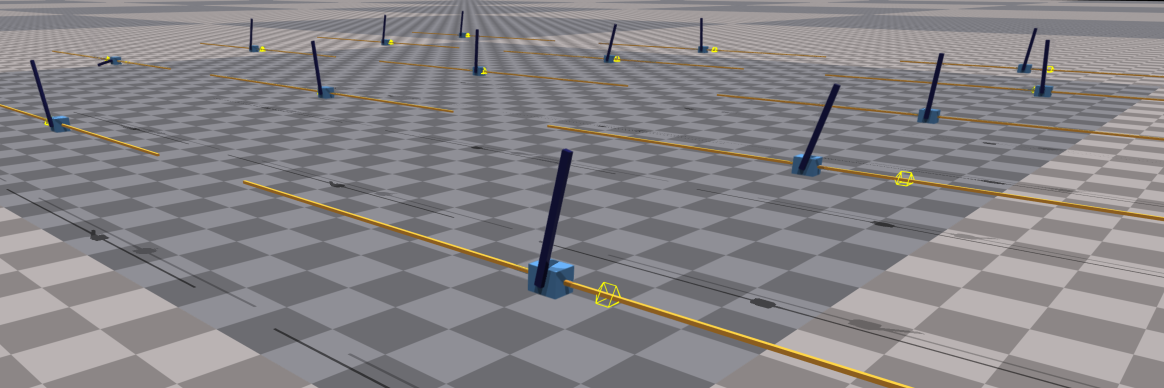
Isaac Gym 是由Nvidia推出的机器人强化学习训练框架,可以实现多智能体并行训练,可快速实现自定义机器人模型训练和迁移。

多年以后才会想起,之前一直想赢的那场比赛,已经过去好久好久了。

摘要: 在心率管家默默无闻地上线了一年多之后,现在终于打算来好好聊聊关于手机摄像头测量心率的那些事。本文参考了很多前辈的文章,将在文末列出。
Hexo 博客部署与更新说明 项目简介 此项目使用 Hexo 搭建的个人博客,部署在 Netlify 上,内容存储在 GitHub 仓库中。 环境要求 Node.js >= 16.x npm >= 7.x 初始化 Hexo 博...