BSpline 三次B样条曲线
BSpline 三次B样条曲线简介与推导
BSpline 三次B样条曲线
B样条
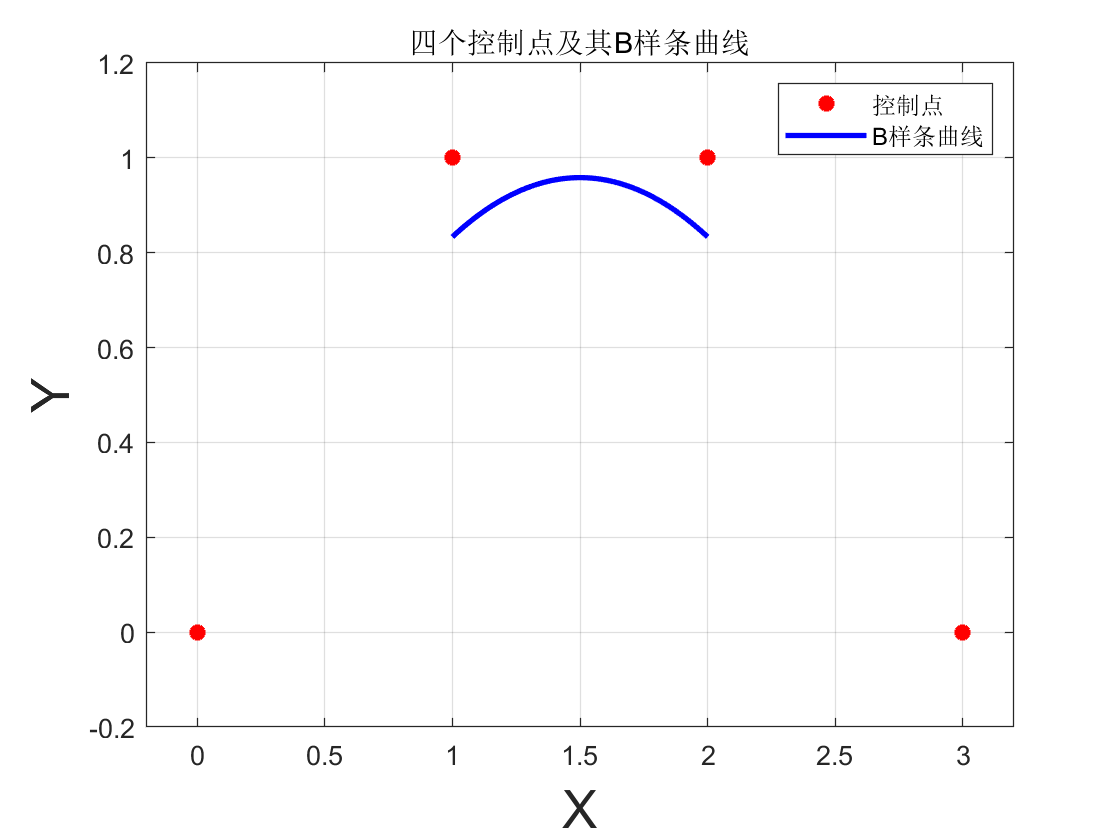
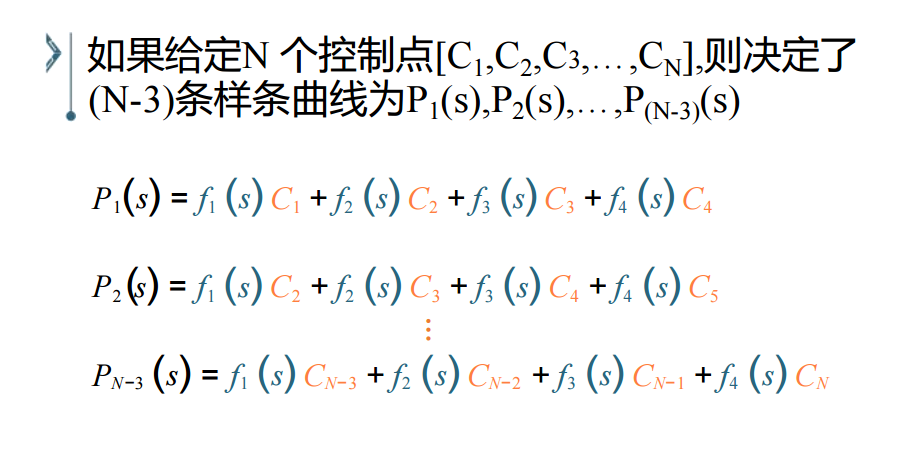
四点三次B样条曲线
四个样条函数(基函数)
\begin{align} f_1(s)&=\frac{1}{6}(-s^3+3s^2-3s+1) \\ f_2(s)&=\frac{1}{6}(3s^3-6s^2+4) \\ f_3(s)&=\frac{1}{6}(-3s^3+3s^2+3s+1) \\ f_4(s)&=\frac{1}{6}s^3 \end{align}
其中:
为归一化路径:
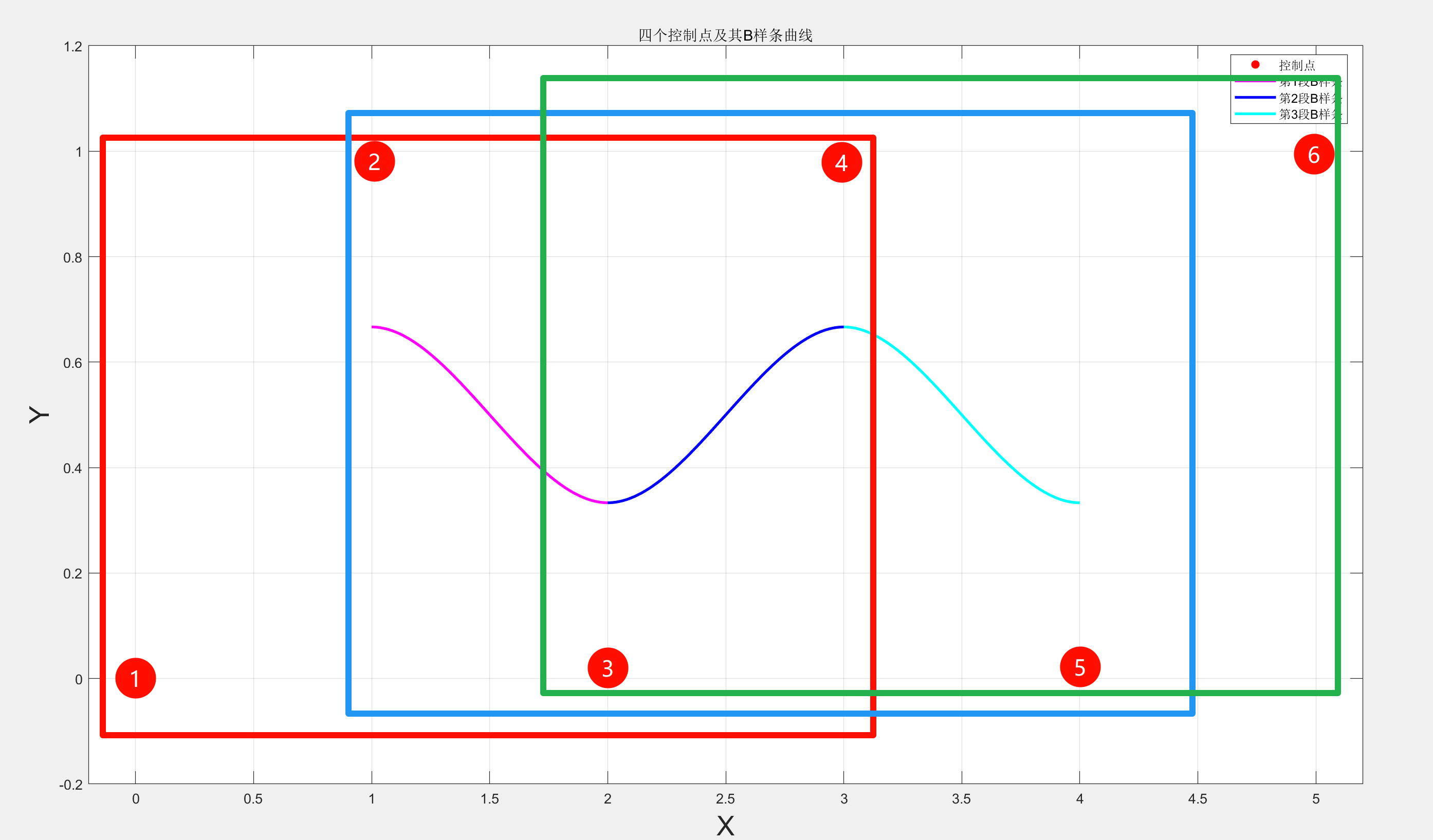
超过四个点?
如果超过了四个点位,我们是否要用更高次幂的函数来拟合?
这样会需要更复杂的运算,并且会导致牵一发而动全身的缺点,无法进行局部调整
当然,也有这种曲线,就是贝塞尔曲线(Bézier Curves)
贝塞尔曲线
Photoshop中三阶贝塞尔曲线
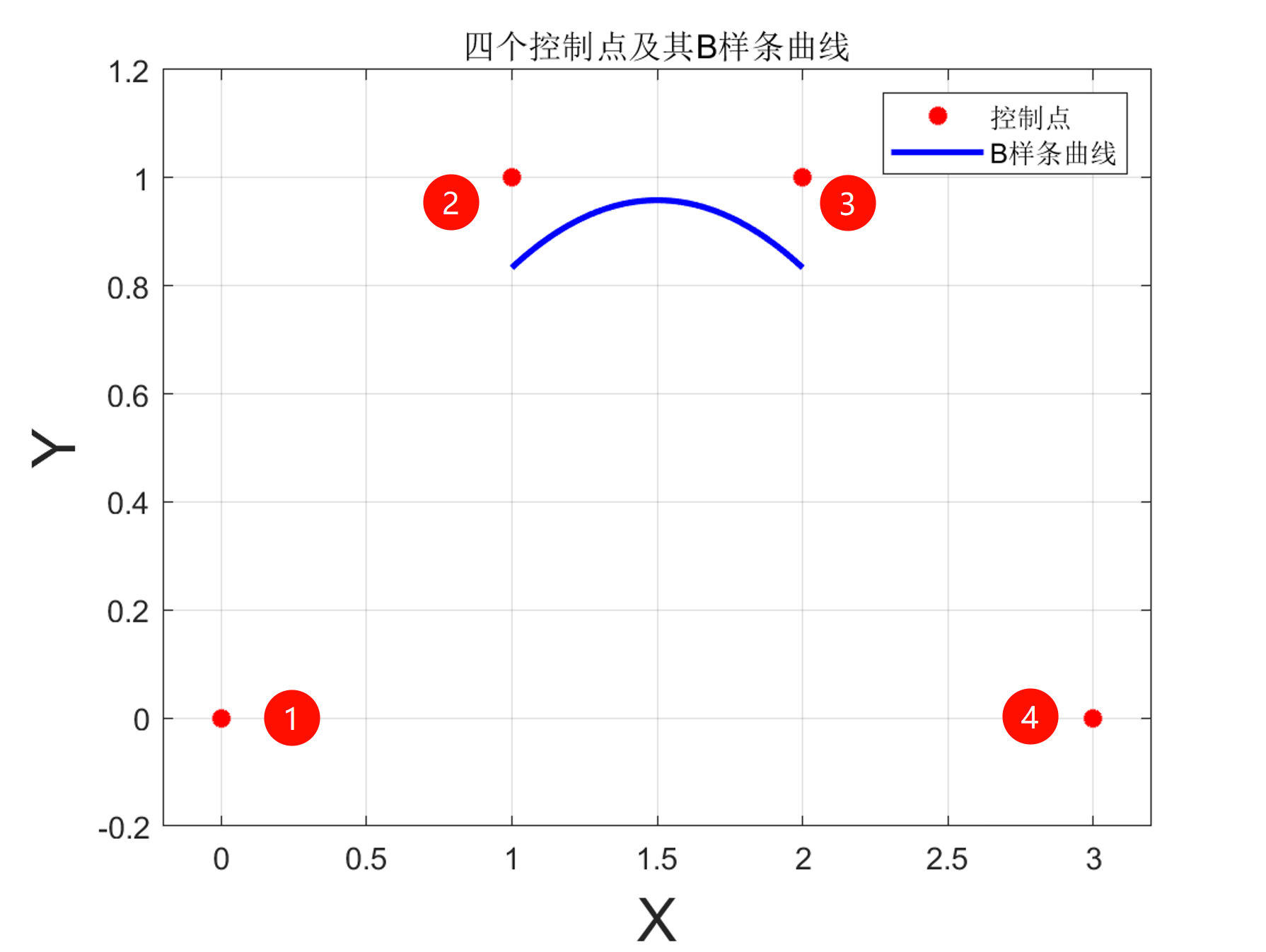
四点三阶B样条
也就是:
过起始点的B样条曲线
上述样条曲线在四点中间,并不过起始点,无法达到我们的拟合或者路径规划的任务
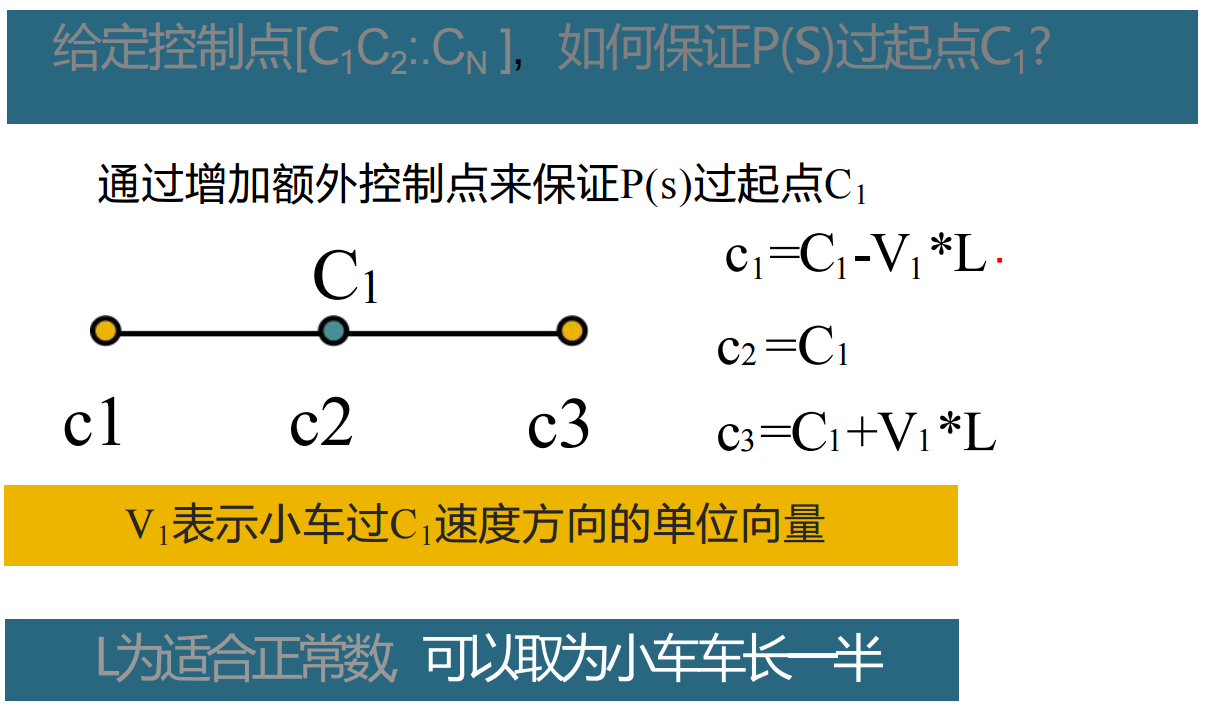
为了能够过起始点,我们采用在起始点添加对称的增广点:
但是采用这种增广模式,如何保证如何保证过起点?
让我们算一算
上式也可以写成矩阵形式:
根据矩阵乘法结合率可知:(AB)C=A(BC)
根据起始点增广的形式我们可以得出:
\begin{align} C_{1}&=C_{O1}-V_1L \\ C_{2}&=C_{O1} \\ C_{3}&=C_{O1}+V_1L \end{align}
可以看出,这种定义使得原本的(或)在增广后的三点连线的中点,如下图所示
所以为了回答**”给定控制点[],如何保证过起点?”**
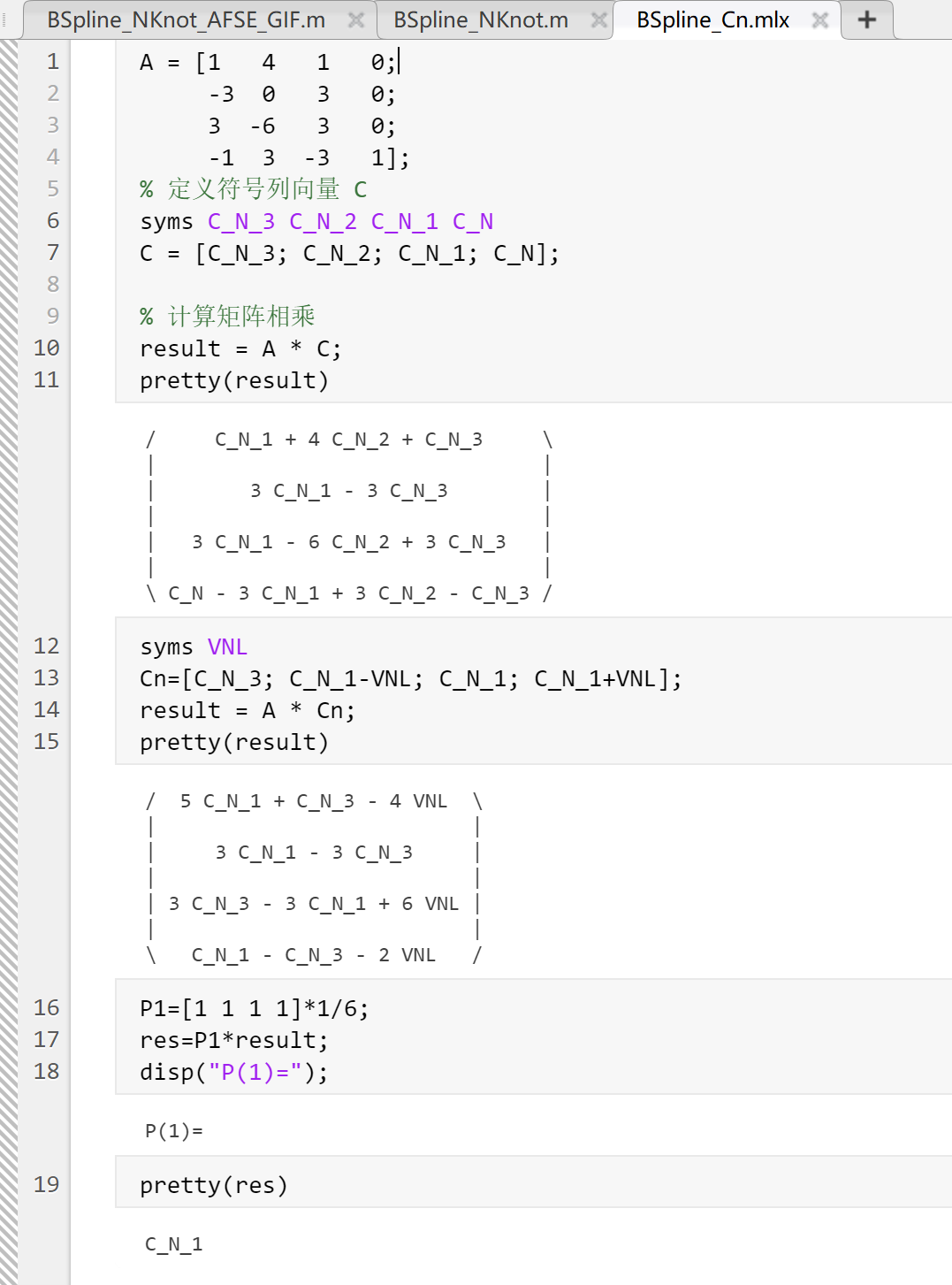
我们可以将增广点代入上式,可得:
\begin{align} P(s)&=\frac{1}{6} \begin{bmatrix} 1 & s & s^2 & s^3 \\ \end{bmatrix} \begin{bmatrix} C_2+V_1L+4C_2+C_2-V_1L \\ -3C_2-3V_1L+3C_2-3V_1L \\ 3C_2+3V_1L-6C_2+3C_2-3V_1L \\ -C_2-V_1L+3C_2-3C_2+3V_1L+C_4 \end{bmatrix} \\ \\ &=\frac{1}{6} \begin{bmatrix} 1 & s & s^2 & s^3 \\ \end{bmatrix} \begin{bmatrix} 6C_2 \\ -6V_1L \\ 0 \\ -C_2+C_4+2V_1L \end{bmatrix} \\ \\ &= \begin{bmatrix} 1 & s & s^2 & s^3 \\ \end{bmatrix} \begin{bmatrix} C_2 \\ -V_1L \\ 0 \\ \frac{1}{6}(-C_2+C_4+2V_1L) \end{bmatrix} \end{align}
当时,即在样条曲线起点:
当我们重新在看这张图片时,就会恍然大悟了
当然,对于终点,同理:
\begin{align} C_{N-2}&=C_{ON}-V_NL \\ C_{N-1}&=C_{ON} \\ C_{N} &=C_{ON}+V_NL \end{align}
代入增广矩阵方程:
太复杂了,不想手算了 😦
根据MATLAB符号运算工具可知:
即最后三点的中点,原始控制点的终点!
当然如果我们改变增广点的位置,使其不对称,就会出现以下情况:
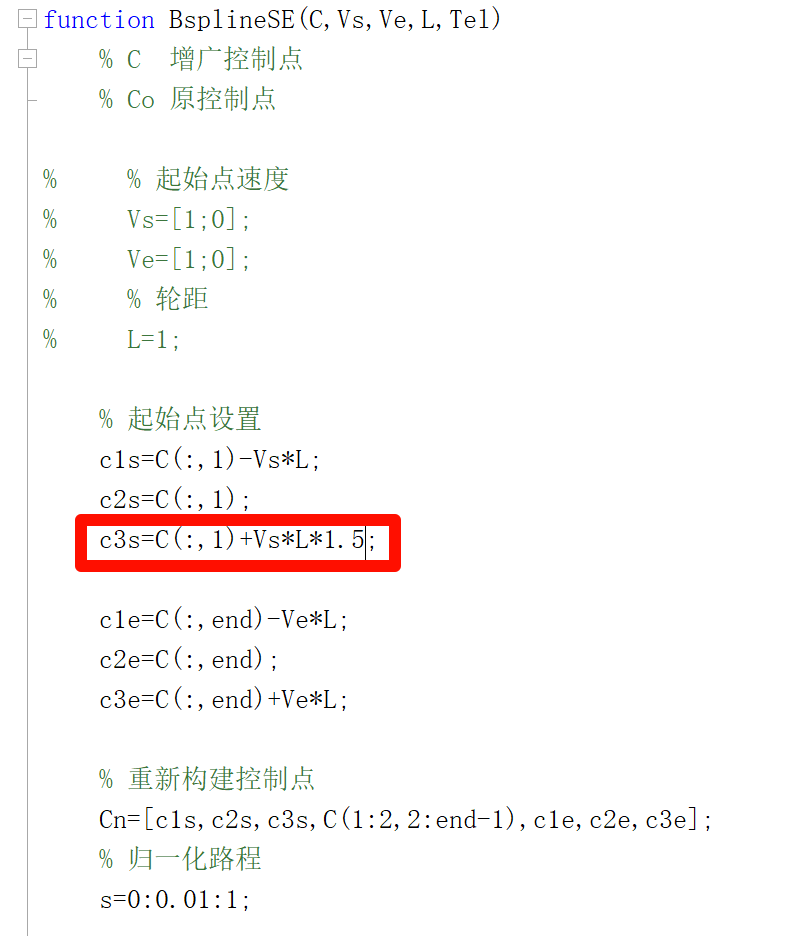
对应图像变化:
是两点中点吗?
show me your code
当然我们可以通过MATLAB符号运算工具轻松得出任意增广点位的起始点和终点情况:
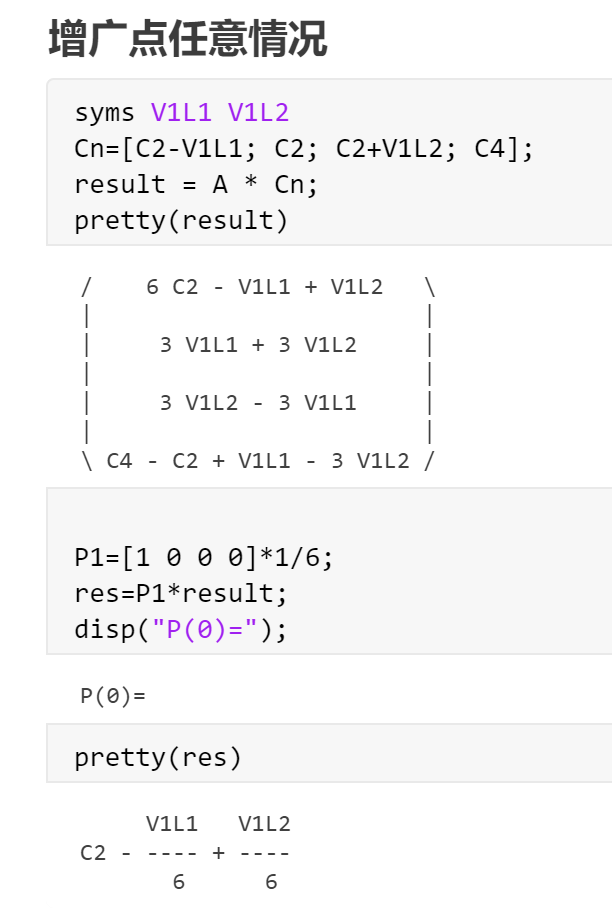
即:
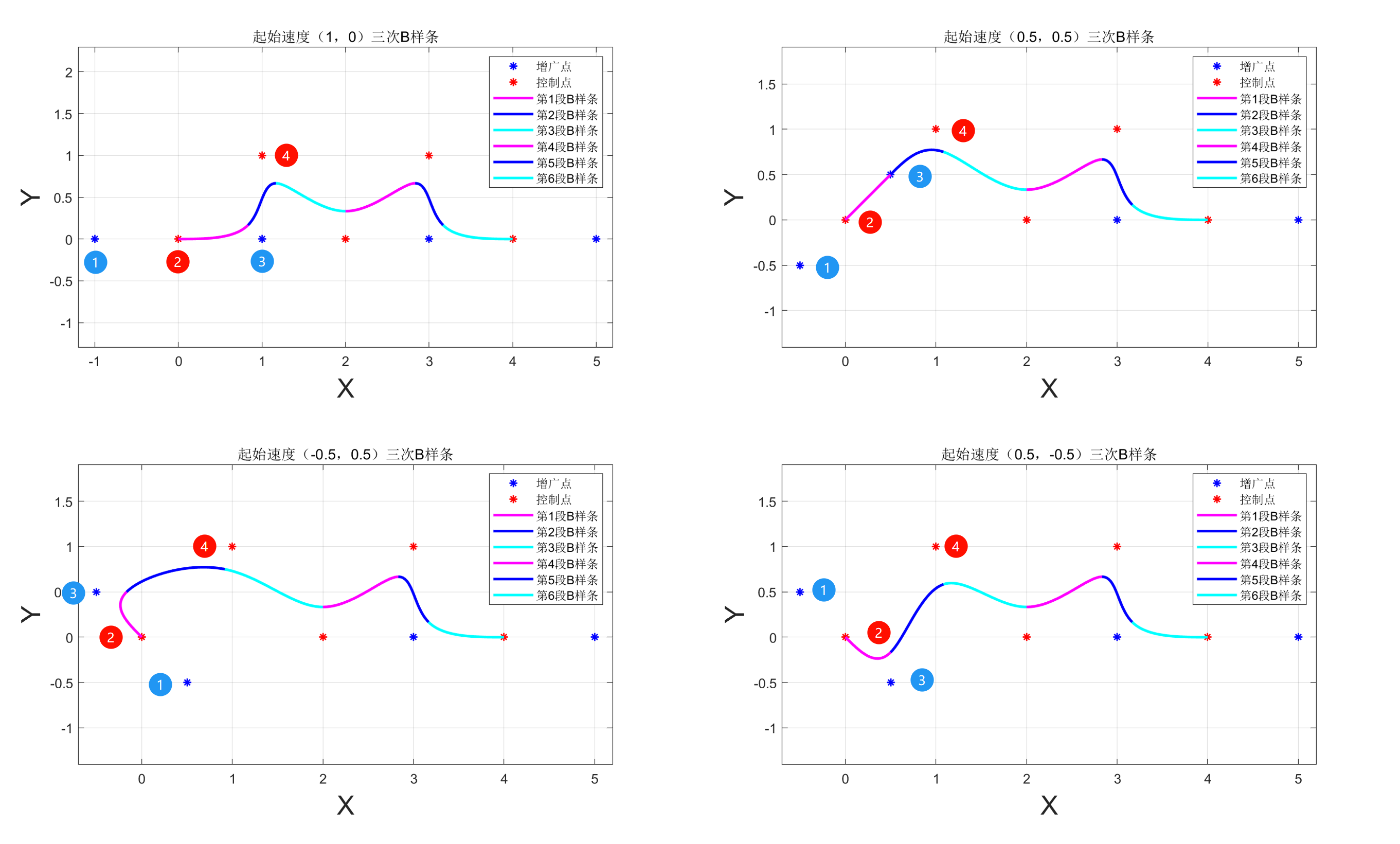
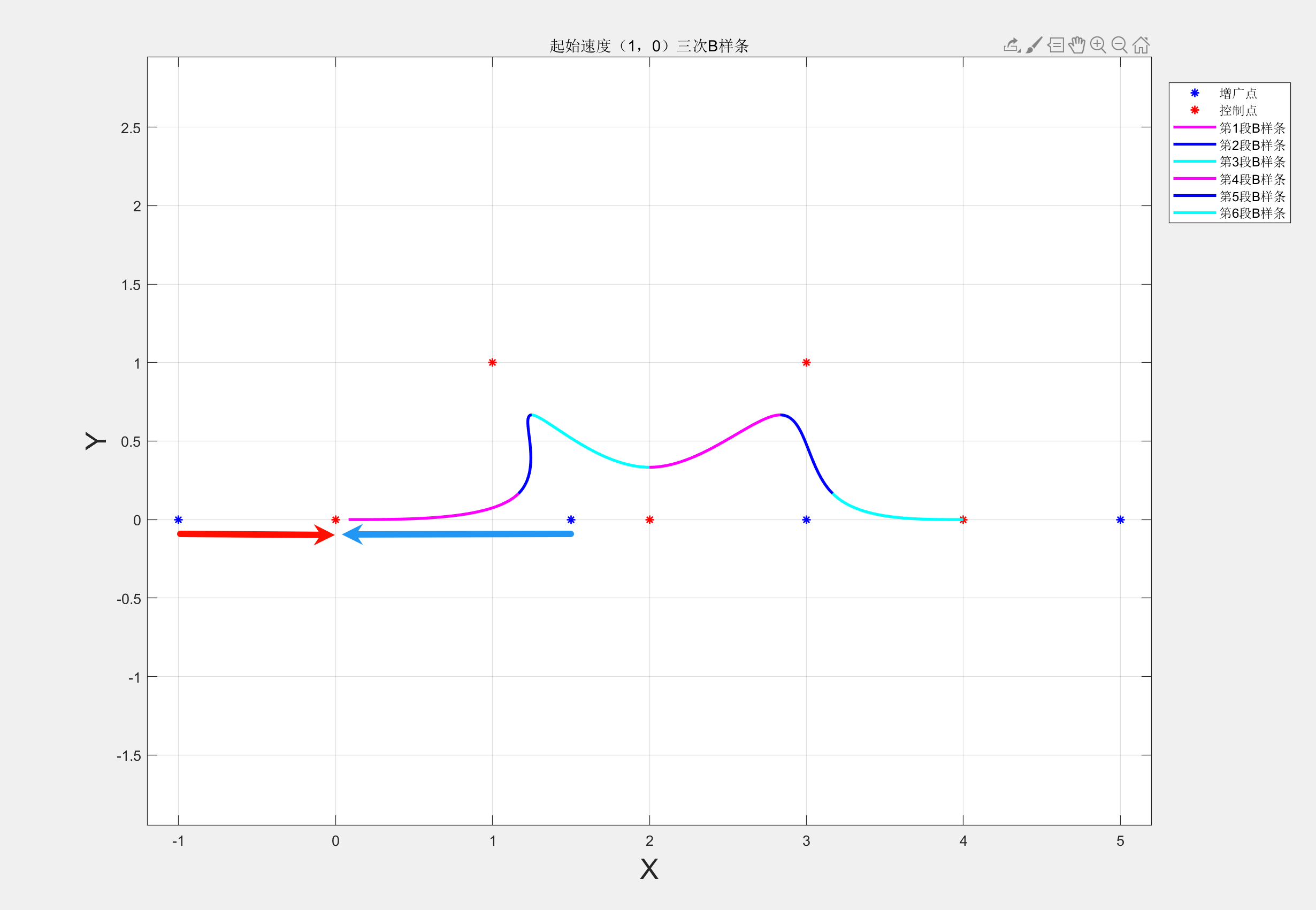
三次B样条在起始点速度对样条的影响
从应用角度:
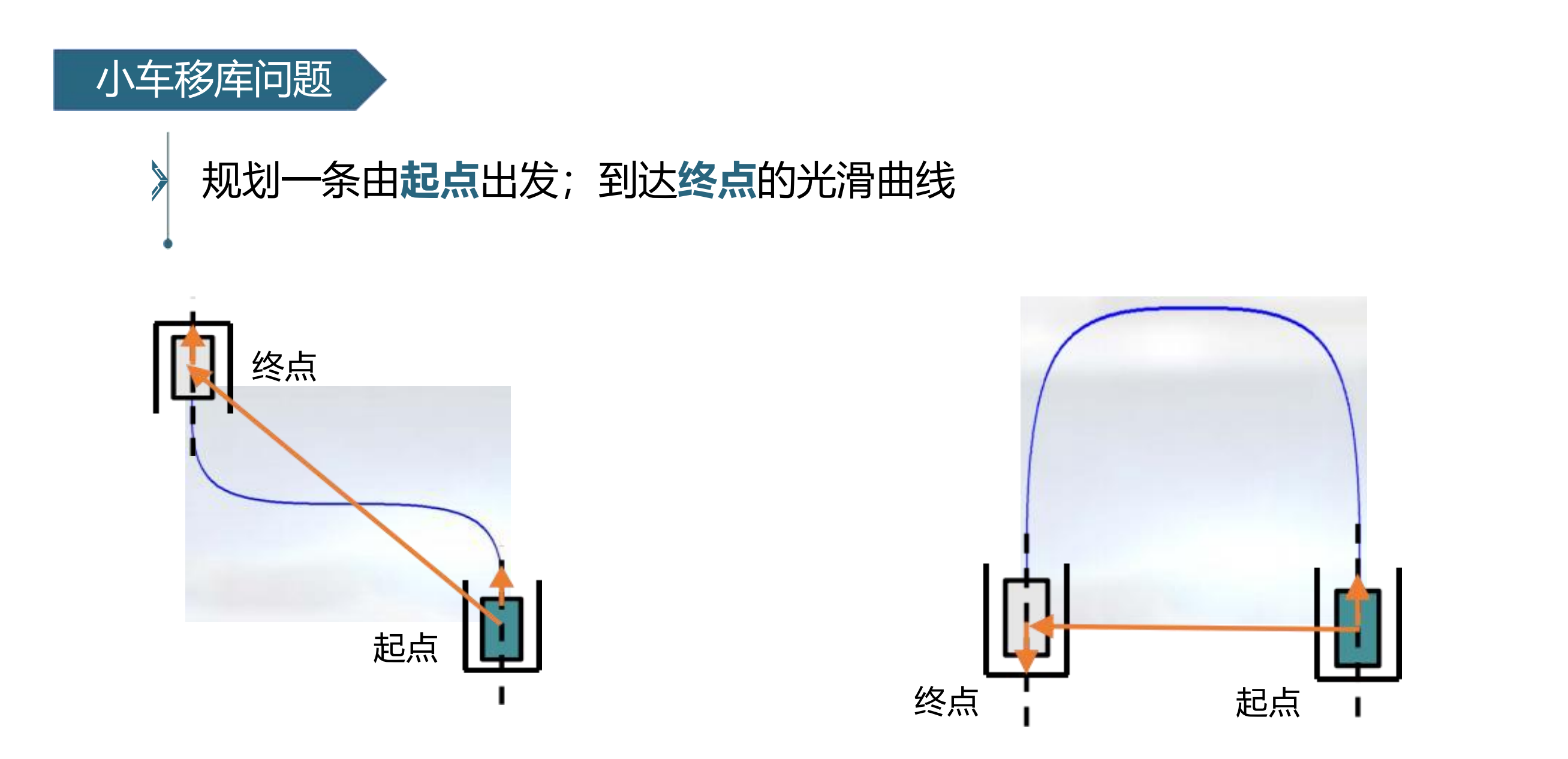
针对第二个入库问题,下列哪个是最合适的解法:
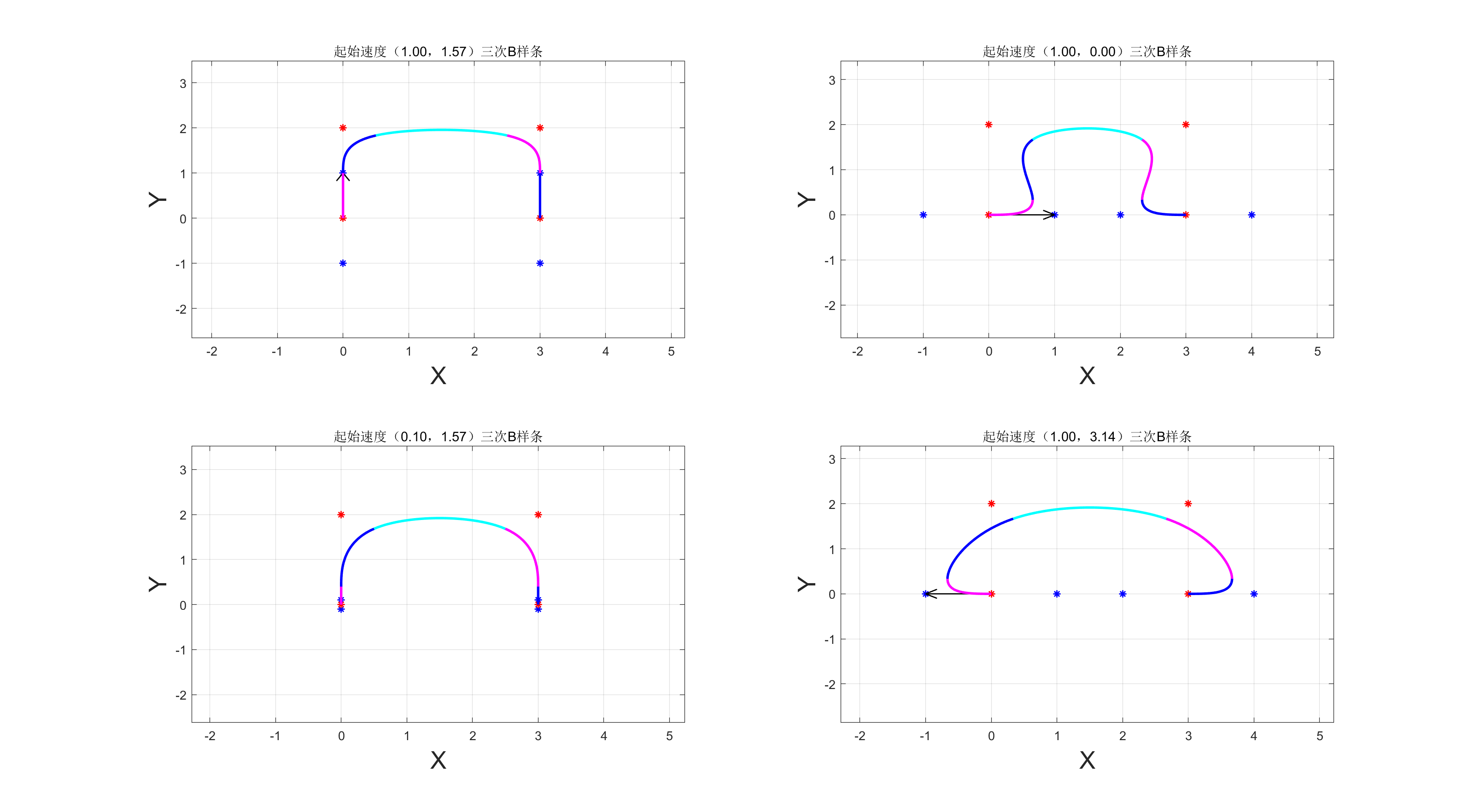
所以,起始点的速度不同(方向和大小),最后生成的B样条也不同,最终方向取决于实际需求
本文采用 署名-非商业性使用-相同方式共享 4.0 国际 许可协议,转载请注明出处。




